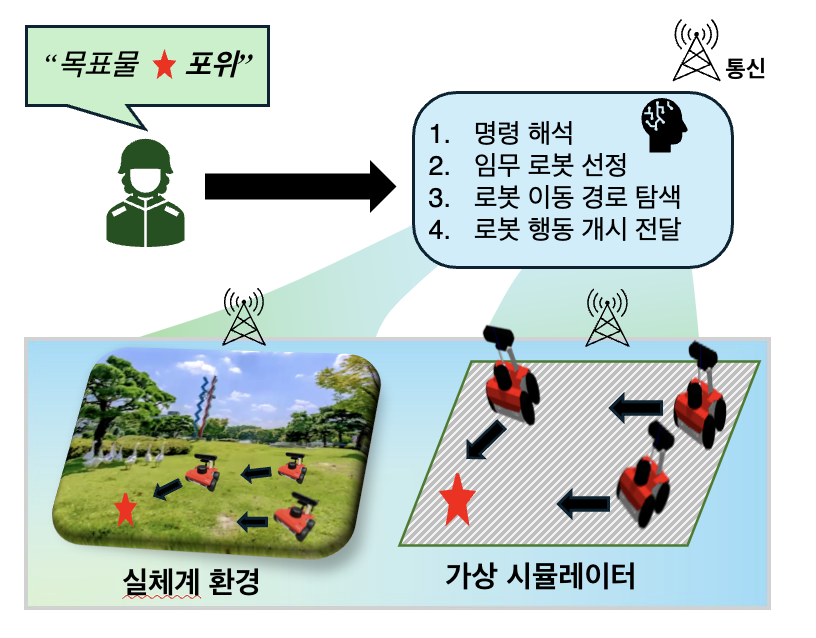
KIMST 2024: 자연어 명령어 기반 군집 로봇 제어 프레임워크
군집 제어 통신을 위한 프레임워크 설계. 자연어 기반 명령어를 통해서 로봇들과 통신하여 명령을 내리는 구조에 대한 논의.
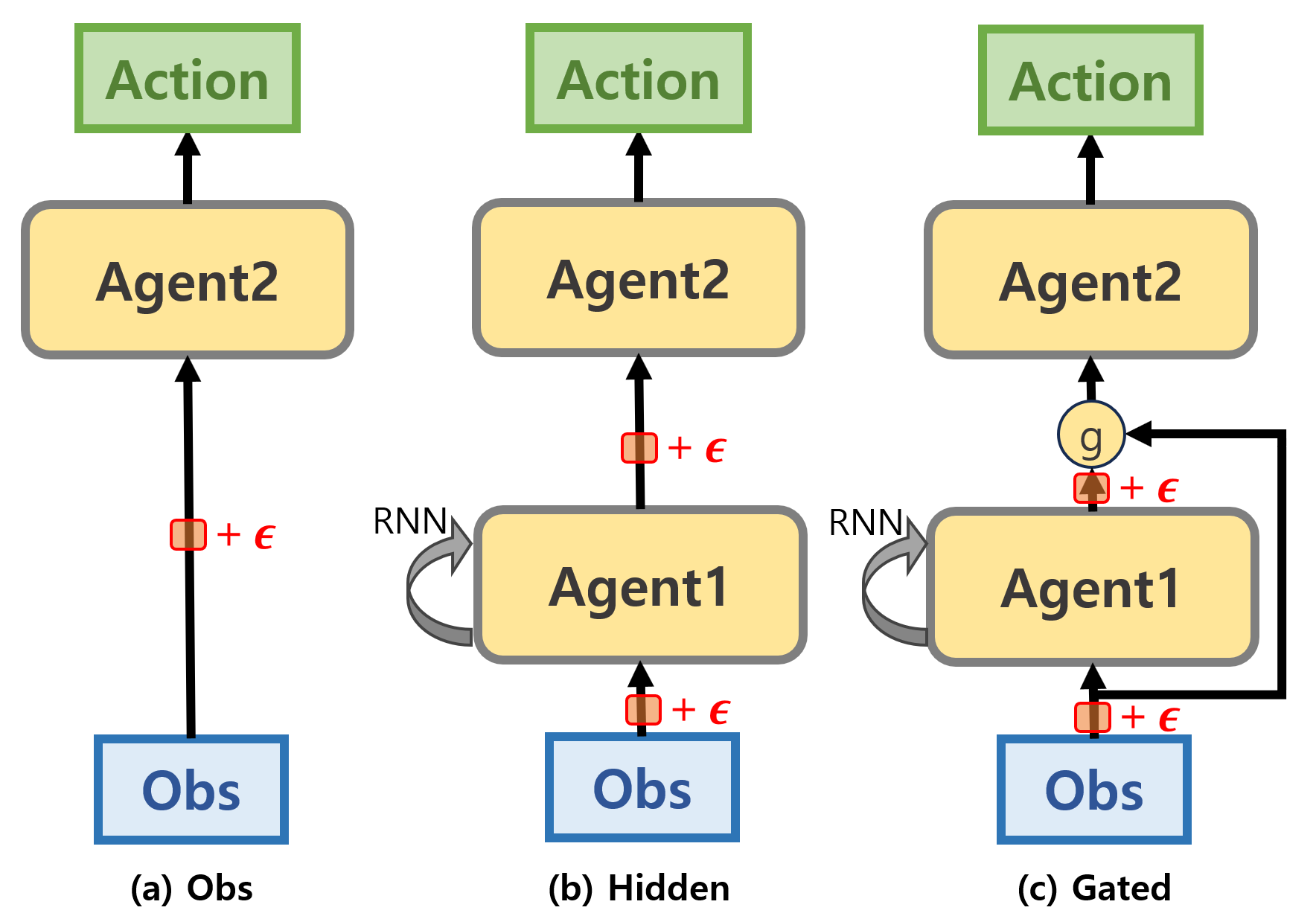
Investigating Instability of Messages in
Multi-agent Reinforcement Learning
Stability analysis of hidden representation messages in multi-agent.
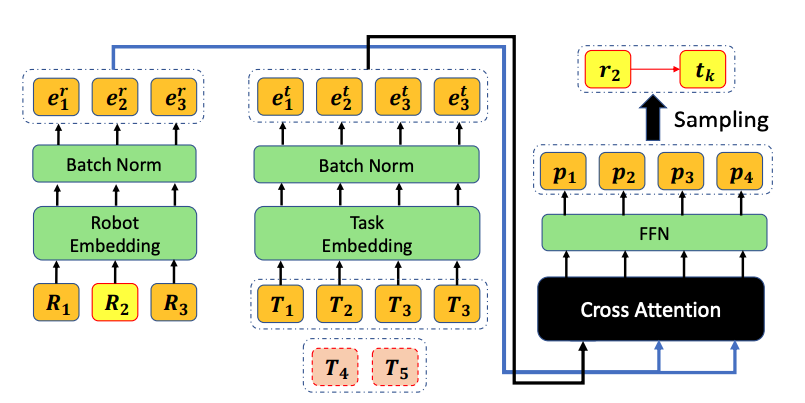
Cooperative Multi-Robot Task Allocation with Reinforcement Learning
This paper deals with the concept of multi-robot task allocation, referring to the assignment of multiple robots to tasks such that an objective function is maximized.